---
author: 玊于
date: 2022/11/17
minute: 30
---
# DataMax 日志节点
[[toc]]
## 术语
- RPO (Recovery Point Objective):数据恢复点目标,指业务系统所能容忍的数据丢失量。
- AZ (Availability Zone):可用区,指同一个地域内电力和网络相互独立的区域,可用区之间可以做到故障隔离。
## 背景
在高可用的场景中,为保证 RPO = 0,主库和备库之间需配置为同步复制模式。但当主备库距离较远时,同步复制的方式会存在较大延迟,从而对主库性能带来较大影响。异步复制对主库的性能影响较小,但会带来一定程度的数据丢失。PolarDB for PostgreSQL 采用基于共享存储的一写多读架构,可同时提供 AZ 内 / 跨 AZ / 跨域级别的高可用。为了减少日志同步对主库的影响,PolarDB for PostgreSQL 引入了 DataMax 节点。在进行跨 AZ 甚至跨域同步时,DataMax 节点可以作为主库日志的中转节点,能够以较低成本实现零数据丢失的同时,降低日志同步对主库性能的影响。
## 原理
### DataMax 高可用架构
PolarDB for PostgreSQL 基于物理流复制实现主备库之间的数据同步,主库与备库的流复制模式分为 **同步模式** 及 **异步模式** 两种:
- **异步模式**:主库事务提交仅需等待对应 WAL 日志写入本地磁盘文件后,即可进行事务提交的后续操作,备库状态对主库性能无影响;但异步模式下无法保证 RPO = 0,备库相较于主库存在一定的延迟,若主库所在集群出现故障,切换至备库可能存在数据丢失的问题;
- **同步模式**:主库及备库之间的同步模式包含不同的级别,当设置 `synchronous_standby_names` 参数开启备库同步后,可以通过 `synchronous_commit` 参数设置主库及备库之间的同步级别,包括:
- `remote_write`:主库的事务提交需等待对应 WAL 日志写入主库磁盘文件及备库的系统缓存中后,才能进行事务提交的后续操作;
- `on`:主库的事务提交需等待对应 WAL 日志已写入主库及备库的磁盘文件中后,才能进行事务提交的后续操作;
- `remote_apply`:主库的事务提交需等待对应 WAL 日志写入主库及备库的磁盘文件中,并且备库已经回放完相应 WAL 日志使备库上的查询对该事务可见后,才能进行事务提交的后续操作。
同步模式保证了主库的事务提交操作需等待备库接收到对应的 WAL 日志数据之后才可执行,实现了主库与备库之间的零数据丢失,可保证 RPO = 0。然而,该模式下主库的事务提交操作能否继续进行依赖于备库的 WAL 日志接收结果,当主备之间距离较远导致传输延迟较大时,同步模式会对主库的性能带来影响。极端情况下,若备库异常崩溃,则主库会一直阻塞等待备库,导致无法正常提供服务。
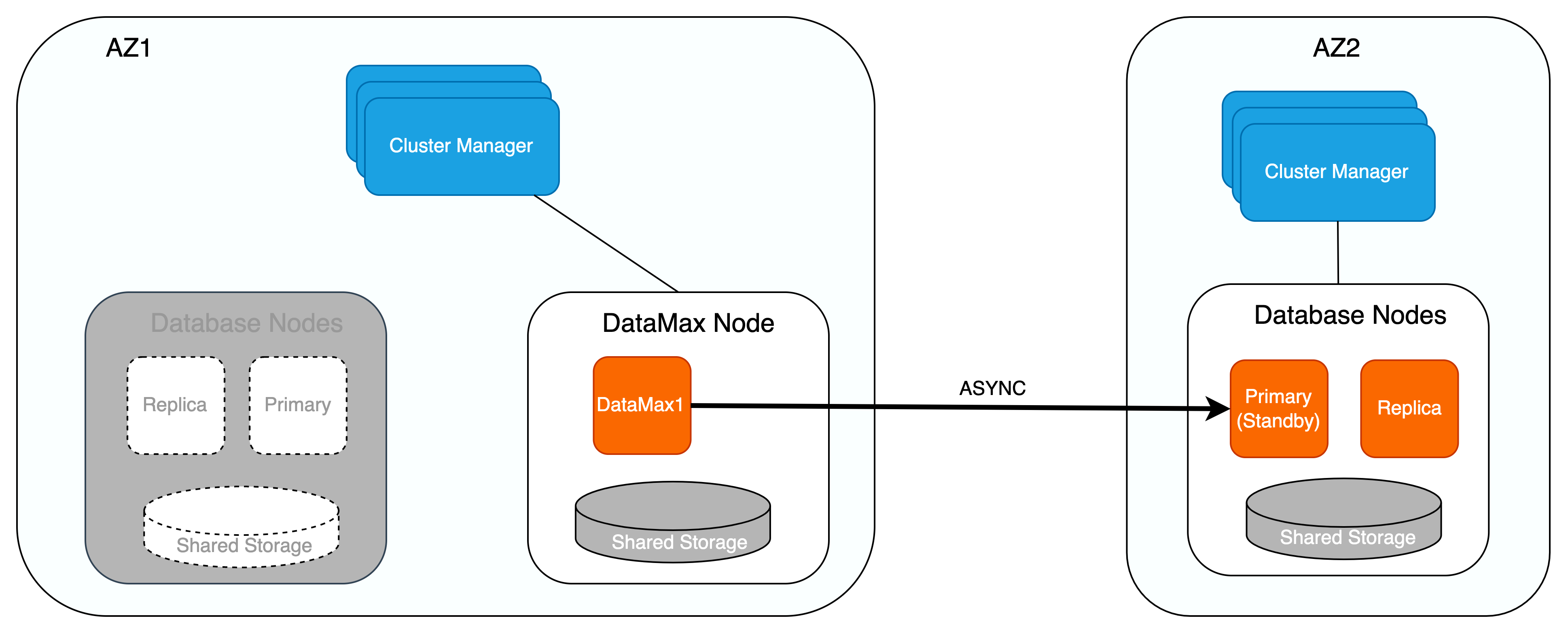
针对传统主备模式下同步复制对主库性能影响较大的问题,PolarDB for PostgreSQL 新增了 DataMax 节点用于实现远程同步,该模式下的高可用架构如下所示:

其中:
1. 一个数据库集群部署在一个可用区内,不同的集群之间互为灾备,以主备模式保证跨 AZ / 跨域级别的高可用;
2. 单个数据库集群内为一写多读架构, Primary 节点和 Replica 节点共享同一份存储,有效降低存储成本;同时 Replica 节点还可以实现单个 AZ 内计算节点的高可用;
3. DataMax 节点与集群内的 Primary 节点部署在同一个可用区内:
- DataMax 节点只接收并保存 Primary 节点的 WAL 日志文件,但不对日志进行回放操作,也不保存 Primary 节点的数据文件,降低存储成本;
- DataMax 节点与 Primary 节点的数据不共享,两者的存储设备彼此隔离,防止计算集群存储异常导致 Primary 节点与 DataMax 节点保存的日志同时丢失;
- DataMax 节点与 Primary 节点之间为 **同步复制** 模式,确保 RPO = 0;DataMax 节点部署在距离 Primary 节点较近的区域,通常与 Primary 节点位于同一可用区,最小化日志同步对 Primary 节点带来的性能影响;
- DataMax 节点将其接收的 WAL 日志发送至其他可用区的 Standby 节点,Standby 节点接收并回放 DataMax 节点的日志,实现与 Primary 节点(主库)的数据同步;Standby 节点与 DataMax 节点之间可设置为异步流复制模式,通过 DataMax 节点可分流 Primary 节点向多个备份数据库传输 WAL 日志的开销。
### DataMax 实现
DataMax 是一种新的节点角色,用户需要通过配置文件来标识当前节点是否为 DataMax 节点。DataMax 模式下,Startup 进程在回放完 DataMax 节点自身日志之后,从 `PM_HOT_STANDBY` 进入到 `PM_DATAMAX` 模式。`PM_DATAMAX` 模式下,Startup 进程仅进行相关信号及状态的处理,并通知 Postmaster 进程启动流复制,Startup 进程不再进行日志回放的操作。因此 DataMax 节点不会保存 Primary 节点的数据文件,从而降低了存储成本。

如上图所示,DataMax 节点通过 WalReceiver 进程向 Primary 节点发起流复制请求,接收并保存 Primary 节点发送的 WAL 日志信息;同时通过 WalSender 进程将所接收的主库 WAL 日志发送给异地的备库节点;备库节点接收到 WAL 日志后,通知其 Startup 进程进行日志回放,从而实现备库节点与 Primary 节点的数据同步。
DataMax 节点在数据目录中新增了 `polar_datamax/` 目录,用于保存所接收的主库 WAL 日志。DataMax 节点自身的 WAL 日志仍保存在原始目录下,两者的 WAL 日志不会相互覆盖,DataMax 节点也可以有自身的独有数据。
由于 DataMax 节点不会回放 Primary 节点的日志数据,在 DataMax 节点因为异常原因需要重启恢复时,就有了日志起始位点的问题。DataMax 节点通过 `polar_datamax_meta` 元数据文件存储相关的位点信息,以此来确认运行的起始位点:
- 初始化部署:在全新部署或者 DataMax 节点重搭的场景下,没有存量的位点信息;在向主库请求流复制时,需要表明自己是 DataMax 节点,同时还需要额外传递 `InvalidXLogRecPtr` 位点,表明其需要从 Primary 节点当前最旧的位点开始复制; Primary 节点接收到 `InvalidXLogRecPtr` 的流复制请求之后,会开始从当前最旧且完整的 WAL segment 文件开始发送 WAL 日志,并将相应复制槽的 `restart_lsn` 设置为该位点;
- 异常恢复:从存储上读取元数据文件,确认位点信息;以该位点为起点请求流复制。

### DataMax 集群高可用
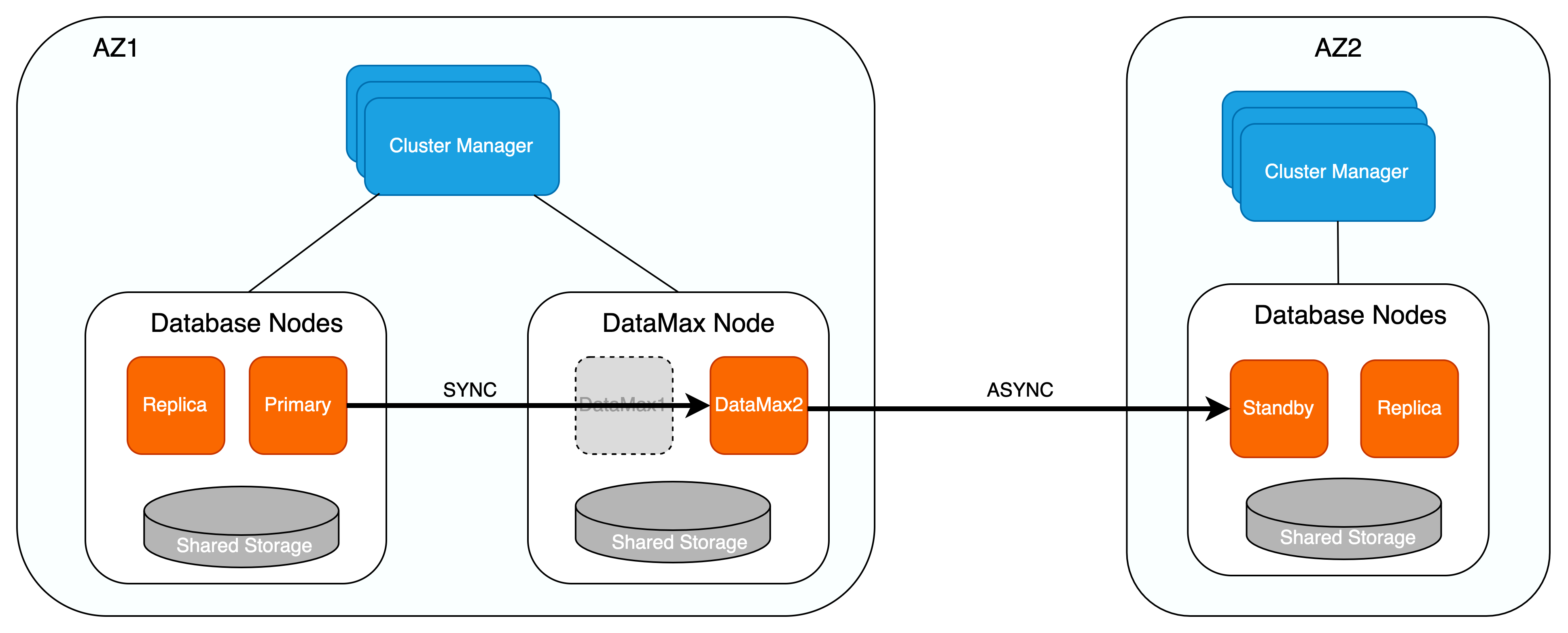
如下图所示,增加 DataMax 节点后,若 Primary 节点与 Replica 节点同时异常,或存储无法提供服务时,则可将位于不同可用区的 Standby 节点提升为 Primary 节点,保证服务的可用性。在将 Standby 节点提升为 Primary 节点并向外提供服务之前,会确认 Standby 节点是否已从 DataMax 节点拉取完所有日志,待 Standby 节点获取完所有日志后才会将其提升为 Primary 节点。由于 DataMax 节点与 Primary 节点为同步复制,因此该场景下可保证 RPO = 0。
此外,DataMax 节点在进行日志清理时,除了保留下游 Standby 节点尚未接收的 WAL 日志文件以外,还会保留上游 Primary 节点尚未删除的 WAL 日志文件,避免 Primary 节点异常后,备份系统无法获取到 Primary 节点相较于 DataMax 节点多出的日志信息,保证集群数据的完整性。
若 DataMax 节点异常,则优先尝试通过重启进行恢复;若重启失败则会对其进行重建。因 DataMax 节点与 Primary 节点的存储彼此隔离,因此两者的数据不会互相影响。此外,DataMax 节点同样可以使用计算存储分离架构,确保 DataMax 节点的异常不会导致其存储的 WAL 日志数据丢失。
类似地,DataMax 节点实现了如下几种日志同步模式,用户可以根据具体业务需求进行相应配置:
- **最大保护模式**:DataMax 节点与 Primary 节点进行同步复制,确保 RPO = 0;若 DataMax 节点因网络或硬件故障无法提供服务,则 Primary 节点也会因此阻塞而无法对外提供服务;
- **最大性能模式**:DataMax 节点与 Primary 节点进行异步复制,DataMax 节点不对 Primary 节点性能带来影响,DataMax 节点异常也不会影响 Primary 节点的服务;若 Primary 节点的存储或对应的集群发生故障,可能导致丢失数据,无法确保 RPO = 0;
- **最大高可用模式**:
- 当 DataMax 节点正常工作时,DataMax 节点与 Primary 节点进行同步复制,即为最大保护模式;
- 若 DataMax 节点异常,Primary 节点自动将同步模式降级为最大性能模式,保证 Primary 节点服务的持续可用性;
- 当 DataMax 节点恢复正常后,Primary 节点将最大性能模式提升为最大保护模式,避免 WAL 日志数据丢失的可能性。
综上,通过 DataMax 日志中转节点降低日志同步延迟、分流 Primary 节点的日志传输压力,在性能稳定的情况下,可以保障跨 AZ / 跨域 RPO = 0 的高可用。
## 使用指南
### DataMax 节点目录初始化
初始化 DataMax 节点时需要指定 Primary 节点的 system identifier:
```shell:no-line-numbers
# 获取 Primary 节点的 system identifier
~/tmp_basedir_polardb_pg_1100_bld/bin/pg_controldata -D ~/primary | grep 'system identifier'
# 创建 DataMax 节点
# -i 参数指定的 [primary_system_identifier] 为上一步得到的 Primary 节点 system identifier
~/tmp_basedir_polardb_pg_1100_bld/bin/initdb -D datamax -i [primary_system_identifier]
# 如有需要,参考 Primary 节点,对 DataMax 节点的共享存储进行初始化
sudo pfs -C disk mkdir /nvme0n1/dm_shared_data
sudo ~/tmp_basedir_polardb_pg_1100_bld/bin/polar-initdb.sh ~/datamax/ /nvme0n1/dm_shared_data/
```
### 加载运维插件
以可写节点的形式拉起 DataMax 节点,创建用户和插件以方便后续运维。DataMax 节点默认为只读模式,无法创建用户和插件。
```shell:no-line-numbers
~/tmp_basedir_polardb_pg_1100_bld/bin/pg_ctl start -D ~/datamax
```
创建管理账号及插件:
```sql:no-line-numbers
postgres=# create user test superuser;
CREATE ROLE
postgres=# create extension polar_monitor;
CREATE EXTENSION
```
关闭 DataMax 节点:
```shell:no-line-numbers
~/tmp_basedir_polardb_pg_1100_bld/bin/pg_ctl stop -D ~/datamax;
```
### DataMax 节点配置及启动
在 DataMax 节点的 `recovery.conf` 中添加 `polar_datamax_mode` 参数,表示当前节点为 DataMax 节点:
```ini:no-line-numbers
polar_datamax_mode = standalone
recovery_target_timeline='latest'
primary_slot_name='datamax'
primary_conninfo='host=[主节点的IP] port=[主节点的端口] user=[$USER] dbname=postgres application_name=datamax'
```
启动 DataMax 节点:
```shell:no-line-numbers
~/tmp_basedir_polardb_pg_1100_bld/bin/pg_ctl start -D ~/datamax
```
### DataMax 节点检查
DataMax 节点自身可通过 `polar_get_datamax_info()` 接口来判断其运行是否正常:
```sql:no-line-numbers
postgres=# SELECT * FROM polar_get_datamax_info();
min_received_timeline | min_received_lsn | last_received_timeline | last_received_lsn | last_valid_received_lsn | clean_reserved_lsn | force_clean
-----------------------+------------------+------------------------+-------------------+-------------------------+--------------------+-------------
1 | 0/40000000 | 1 | 0/4079DFE0 | 0/4079DFE0 | 0/0 | f
(1 row)
```
在 Primary 节点可以通过 `pg_replication_slots` 查看对应复制槽的状态:
```sql:no-line-numbers
postgres=# SELECT * FROM pg_replication_slots;
slot_name | plugin | slot_type | datoid | database | temporary | active | active_pid | xmin | catalog_xmin | restart_lsn | confirmed_flush_lsn
-----------+--------+-----------+--------+----------+-----------+--------+------------+------+--------------+-------------+---------------------
datamax | | physical | | | f | t | 124551 | 570 | | 0/4079DFE0 |
(1 row)
```
### 日志同步模式配置
通过配置 Primary 节点的 `postgresql.conf`,可以设置下游 DataMax 节点的日志同步模式:
最大保护模式。其中 `datamax` 为 Primary 节点创建的复制槽名称:
```ini:no-line-numbers
polar_enable_transaction_sync_mode = on
synchronous_commit = on
synchronous_standby_names = 'datamax'
```
最大性能模式:
```ini:no-line-numbers
polar_enable_transaction_sync_mode = on
synchronous_commit = on
```
最大高可用模式:
- 参数 `polar_sync_replication_timeout` 用于设置同步超时时间阈值,单位为毫秒;等待同步复制锁超过此阈值时,同步复制将降级为异步复制;
- 参数 `polar_sync_rep_timeout_break_lsn_lag` 用于设置同步恢复延迟阈值,单位为字节;当异步复制延迟阈值小于此阈值时,异步复制将重新恢复为同步复制。
```ini:no-line-numbers
polar_enable_transaction_sync_mode = on
synchronous_commit = on
synchronous_standby_names = 'datamax'
polar_sync_replication_timeout = 10s
polar_sync_rep_timeout_break_lsn_lag = 8kB
```